
|
Datos del producto:
|
| Resaltar: | Finger robótico suave de la patente extranjera,Finger robótico suave de la patente nacional,Finger robótico del CE |
||
|---|---|---|---|
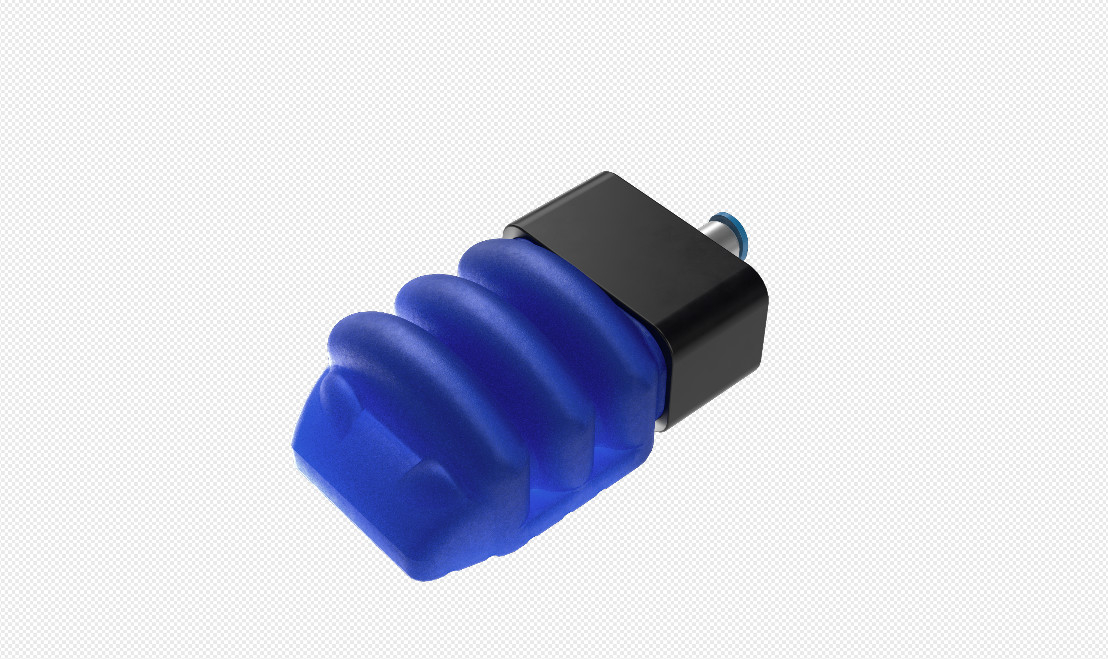
N5056 + patentes nacionales y extranjeras + fingeres suaves del robot
Fingeres suaves del robot que interrumpen tecnología conmovedora flexible
El mercado de la automatización industrial se ha desarrollado al punto donde pesado, trabajo manual simple ha sido solucionado por las soluciones probadas. Los desafíos se fueron para el reemplazo de la máquina del trabajo manual ahora se centran en la producción automatizada de multi-categoría, formada y de artículos frágiles. Limitado por la falta de accesorios de fijación con abrazadera flexibles, estos artículos se pueden cargar y descargar solamente manualmente, grandemente limitando la capacidad de producción del fabricante y aumentando costes.
De hecho, esto es un problema común en la industria global y no ha habido solución madura en China o en el extranjero durante mucho tiempo. En respuesta a estas necesidades, SRT desarrolló un finger flexible del robot para solucionar el problema a nivel industrial del cargamento y de la descarga automatizados de formado y los artículos frágiles, y sintió bien a la primera compañía en China para desarrollar y para producir un agarrador flexible.
| W/mm | 50 | |
| L/mm | 56 | |
| Ln/mm | 81,5 | |
| T/mm | 33,5 | |
| X/mm | 1,5 | |
| A/mm | 48 | |
| B/mm | 27 | |
| Smax/mm | 20 | |
| Ymax/mm | 31 | |
| weight/g | 121,2 | |
| yema del dedo thrust/N | 17 | |
| coeficiente de la carga de finger/g individual | vertical | 670 |
| paquete | 1300 | |
| velocidad de trabajo/CPM | <110> | |
| vida/combate del producto | >300W | |
| presión de funcionamiento | -60~100kPa | |
| Diámetro de la conexión | 6m m | |
![]()
Persona de Contacto: Miss. wang
Teléfono: +8618651125686