
|
Datos del producto:
|
| Peso: | 507g | ||
|---|---|---|---|
| Resaltar: | Agarrador suave versátil de la robótica,agarrador suave de la robótica de la carga 1920g,agarrador suave del robot de la carga 1920g |
||
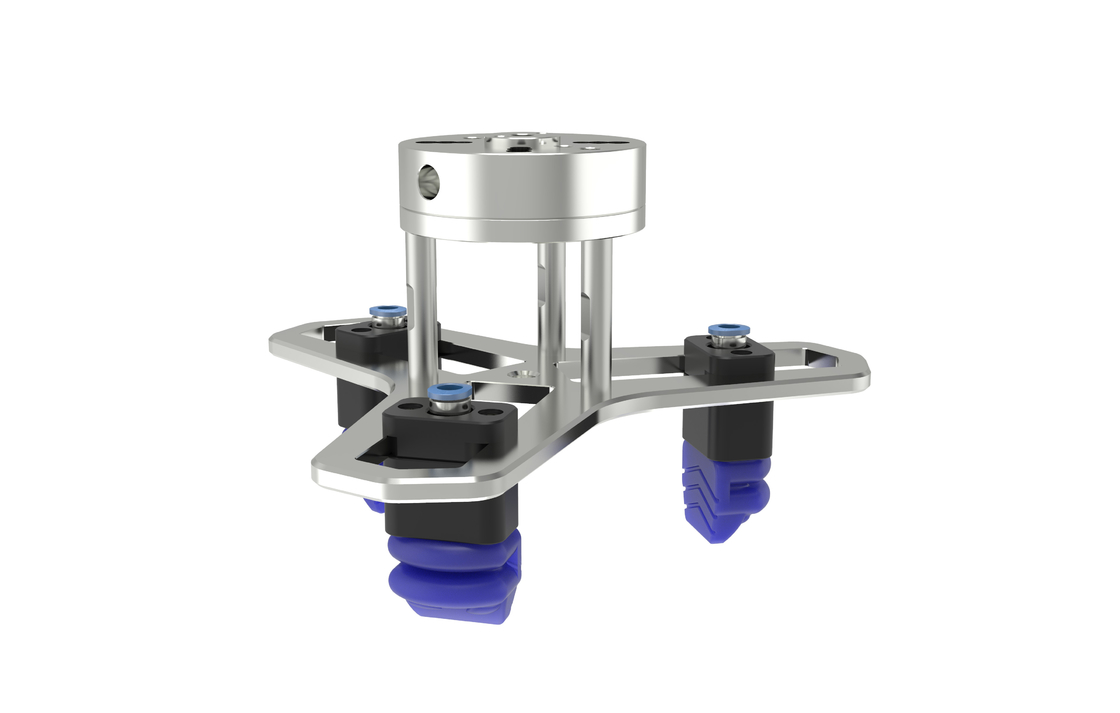
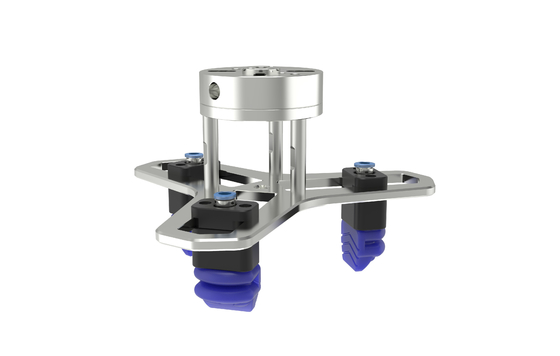
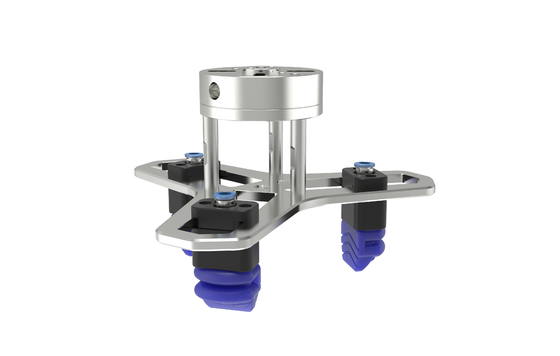
SFG-FNC3-N3025 + flexibilidad + agarrador suave del robot
Agarrador suave del robot usando las partículas para transferir fuerzas
La mayoría de los actuadores flexibles convencionales son conducidos por la presión neumática o hydráulica y requieren hermeticity y una bomba grande de la impulsión. Durante agarrar, se espera que la tiesura del agarrador a menudo aumente con la deformación creciente, que es difícil de alcanzar para los actuadores convencionales. Se requiere este papel presenta un actuador del suave-cuerpo que utilice partículas para conducir los agarradores, ningún lacre y el actuador se puede conducir para doblar usando solamente un pistón para empujar las partículas. En experimentos, cuando el volumen de partículas inyectadas cambiadas a partir de 1,0 veces el volumen inicial del actuador a 1,8 veces el volumen inicial, el actuador doblado a 60° con un aumento casi de siete veces en la tiesura comparada al estado inicial. Para verificar la viabilidad de este método, un agarrador del suave-cuerpo que consistía en tres actuadores del suave-cuerpo fue desarrollado. Este método proporciona una alternativa importante para el diseño y el desarrollo de agarradores flexibles.
| φb | 200 |
| Wn | 30 |
| Dn | 31-142 |
| Libra | 68,2 |
| Lt | 62,7 |
| Ln | 44 |
| L | 25 |
| Smax | 6 |
| Ymax | 10 |
| gama de la dimensión del objeto | 31-154 |
| carga (g) | 1920 |
| peso del producto (g) | 507 |
| presión de trabajo máxima | 100kPa |
| vida del producto | 300w |
![]()
Persona de Contacto: Miss. wang
Teléfono: +8618651125686