Usos clásicos en industria alimentaria fresca--Agarrador suave del robot de la serie de SFG-N
Descripción de producto
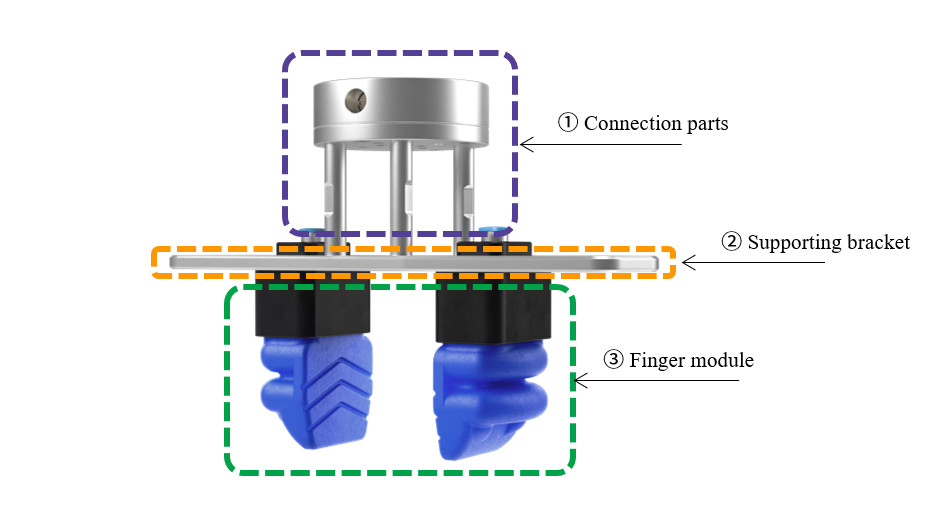
El agarrador suave del finger de SFG es un nuevo tipo de agarrador flexible puesto en marcha por SRT, que se compone principalmente del módulo del finger, del soporte y del conector flexibles del brazo mecánico. El módulo flexible del finger es el componente de la base del agarrador flexible de SFG, y la parte ejecutiva se vierte de la goma de silicona de la categoría alimenticia, que es caracterizada por buena flexibilidad, vida de servicio larga y alta confiabilidad. El diseño del modelo del diamante se añade a la superficie interna del finger, que tiene una mejores fricción y resistencia bajo condición de la ayuda dual. El soporte y el conector se hacen de la aleación de aluminio de alta resistencia del grado de la aviación, que es ligera en peso y alto en fuerza, y pueden manejar fácilmente diversas ocasiones industriales. Puede envolver adaptante el objeto de la blanco sin pre la determinación según el tamaño, la forma y la dureza exactos del objeto. Puede librarse de los apremios de líneas de montaje tradicionales en los materiales entrantes y puede manejar las partes de diversos tamaños y formas.
![]()
Principios de funcionamiento
El agarrador suave tiene estructura especial del saco hinchable, produciendo diversos movimientos según diferencia de la presión interna y externa.
tiende a agarrar, uno mismo-adaptante que cubre el interfaz del objeto, y terminando agarrando el movimiento.
los agarradores se abren y lanzar el objeto y terminan la comprensión favorable interna en algunas situaciones específicas.
![]()
![]()
![]()
Codificación de principios
![]()
Reglas de la codificación del módulo del finger
![]()
Montaje part-TC4
Tc4 es un accesorio modular que coopera con la serie de SFG de agarrador flexible y de la conexión mecánica de la máquina. El despliegue rápido y el reemplazo rápido de accesorios pueden ser terminados aflojando menos tornillos.
![]()
el *The ensancha tamaño de la pieza del montaje del robot es compatible con los tres tamaños comunes en ISO9409-1: 200 (GB/T14468.1: 2004).
Montaje del soporte parte-favorable
![]()
Módulo suave del finger
![]()
![]()
Parámetros del producto
| Modelo | N2020 | N2027 | N3025 | N3034 | N3043 | N3052 | N4036 | N4049 | N4062 | N4075 | N5041 | N5056 | N5072 | N5087 | N6047 | N6064 | |
| W/mm | 20 | 30 | 40 | 50 | 60 | ||||||||||||
| L/mm | 19,2 | 26,5 | 25 | 34 | 45 | 54 | 35,5 | 48,5 | 62,5 | 75 | 40,5 | 56 | 73 | 88 | 47 | 64 | |
| Ln/mm | 34,2 | 41,5 | 44 | 53,5 | 64 | 73 | 59,5 | 72,5 | 86,5 | 99 | 66 | 81,5 | 98,5 | 113,5 | 77,7 | 94,7 | |
| T/mm | 16 | 16,8 | 20,5 | 21,5 | 22 | 22 | 26,5 | 28 | 28,5 | 28,5 | 31,5 | 33,5 | 33,5 | 34 | 35,2 | 38 | |
| X/mm | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 0 | 0 | -0,5 | -0,5 | 1,5 | 1,5 | 0 | 0,5 | 0 | 0 | |
| A/mm | 22 | 22 | 30 | 30 | 30 | 30 | 40 | 40 | 40 | 40 | 48 | 48 | 48 | 48 | 53,5 | 53,5 | |
| B/mm | 16 | 16 | 19 | 19 | 19 | 19 | 24 | 24 | 24 | 24 | 27 | 27 | 27 | 27 | 30,5 | 30,5 | |
| Smax/mm | 5 | 10 | 6 | 15 | 23 | 30 | 9 | 19 | 25 | 37 | 12 | 20 | 36 | 46 | 18 | 31 | |
| Ymax/mm | 6 | 11,5 | 10 | 19 | 28 | 36 | 13 | 24 | 36 | 50 | 17 | 31 | 47 | 60 | 24 | 40 | |
| Weight/g | 18,9 | 20,6 | 40,8 | 44,3 | 48 | 52 | 74,4 | 85,5 | 96,5 | 105,5 | 104,3 | 121,2 | 140,8 | 157,8 | 158,1 | 186,6 | |
| Fuerza que empuja en fingertip/N | 4 | 3,8 | 8 | 7 | 5,6 | 4,6 | 12 | 11 | 8,5 | 7 | 19 | 17 | 13,5 | 11 | 26 | 25 | |
| Solo finger coeffic- de la carga ient/g |
Vertical | 200 | 180 | 370 | 300 | 185 | 150 | 560 | 500 | 375 | 300 | 710 | 670 | 600 | 500 | 750 | 750 |
| Cubierto | 290 | 300 | 480 | 500 | 380 | 300 | 690 | 710 | 580 | 570 | 1200 | 1300 | 1100 | 1000 | 1600 | 1750 | |
| Frecuencia de funcionamiento máxima (CPM) | <300 | ||||||||||||||||
| Vida útil/épocas de trabajo estándar | >3,000,000 | ||||||||||||||||
| Presión de funcionamiento/kPa | -60~100 | ||||||||||||||||
| Conducto de aire diameter/mm | 4 | 6 | |||||||||||||||
Fuerza de empuje de la sola exhibición de la prueba del finger
![]()
Especificación material
![]()
Nuestros productos se venden en todo el mundo, puede estar seguro de todo el proceso de nuestros productos.